СЕРВИС ПО ВЫБОРУ ДАТЧИКОВ
Часть 5. ФИЛКУССТ. Измерительные возможности датчиков положения различных принципов действия. Part 5. Measuring capabilities of position sensors.
22.06.2022
Часть 5. Измерительные возможности датчиков положения различных принципов действия. Конкретные примеры.
Бинарный (то есть двоичный /от слова «би» - два/, переключательный, логический, релейный) выходной сигнал бесконтактного датчика позволяет получить информацию об обнаружении объекта :
- обнаружен / не обнаружен,
- есть / нет,
- логический 0 / логическая 1,
- да / нет,
- близко / далеко и т.д.
Во многих случаях автоматизированного производства наличие таких бинарных сигналов о техпроцессе, об объекте вполне достаточно. Поэтому бинарный информационный сигнал иногда может рассматриваться как измерительный, то есть содержащий информацию об объекте измерения. Однако существует огромное количество физических, технологических задач, когда недостаточно знать об объекте лишь то, что он присутствует или отсутствует. Нужно знать, причём с гарантированной точностью и в любой момент времени, где, на какой дистанции находится объект измерения. Такая задача непрерывного контроля за положением объекта - одна из самых распространённых в автоматизации. В качестве объекта измерения могут выступать:
- рабочий орган машины,
- исполнительный механизм,
- физические размеры выпускаемой продукции,
- дистанция до человека, работающего вблизи опасной зоны, и т.д.
Техническая задача о непрерывном измерении положения, дистанции будет решена, если на выходе бесконтактного датчика положения будет создан сигнал, находящийся в некоторой функциональной зависимости от дистанции до объекта измерения. В практике удобнее всего, когда эта функциональная зависимость является прямой пропорцией : X = k L, где
L- дистанция до объекта;
k- коэффициент пропорциональности,
X- выходной сигнал бесконтактного датчика.
В современной электротехнике, чаще других, применяются следующие типы выходных сигналов датчиков:
а). аналоговые; чаще всего применяются такие два вида сигналов: токовый 4-20 mA или вольтовый 0-10 V; здесь величины тока или напряжения находятся в функциональной зависимости от измеряемой величины;
б). частотные; это импульсный сигнал; здесь частота импульсов находится в функциональной зависимости от измеряемой величины;
в). цифровые (кодовые); таких сигналов придумано и стандартизовано сотни видов; здесь цифровой код находится в функциональной зависимости от измеряемой величины.
Таким образом, если на выходе датчика имеется какой-либо из трёх вышеперечисленных выходных сигналов, то датчик может служить измерительным устройством. (Строго говоря, бинарный выходной сигнал датчика тоже можно полагать самой простой разновидностью цифрового сигнала. И можно рассматривать бинарный сигнал как измерительный. Однако, для точных измерений такой сигнал зачастую слишком груб.)
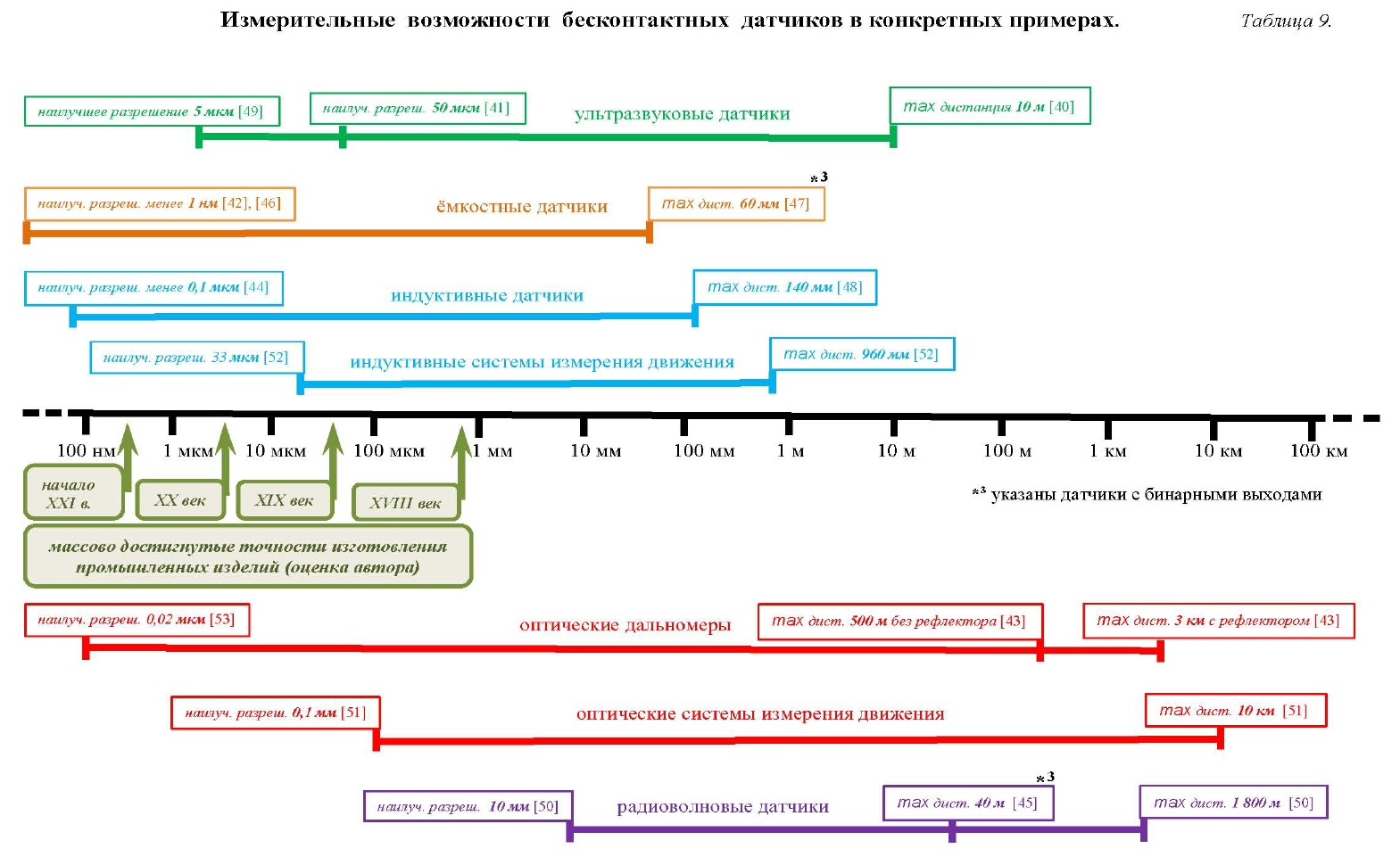
Сотни компаний промышленно развитых стран в течение десятилетий специализируются на производстве датчиков положения. Производится огромное количество датчиков положения для измерения линейных перемещений. Таблица 9 даёт возможность оценить измерительные возможности бесконтактных датчиков положения нескольких принципов действия на конкретных примерах.
В таблице 9 представлены бесконтактные датчики положения нескольких производителей семи принципов действия :
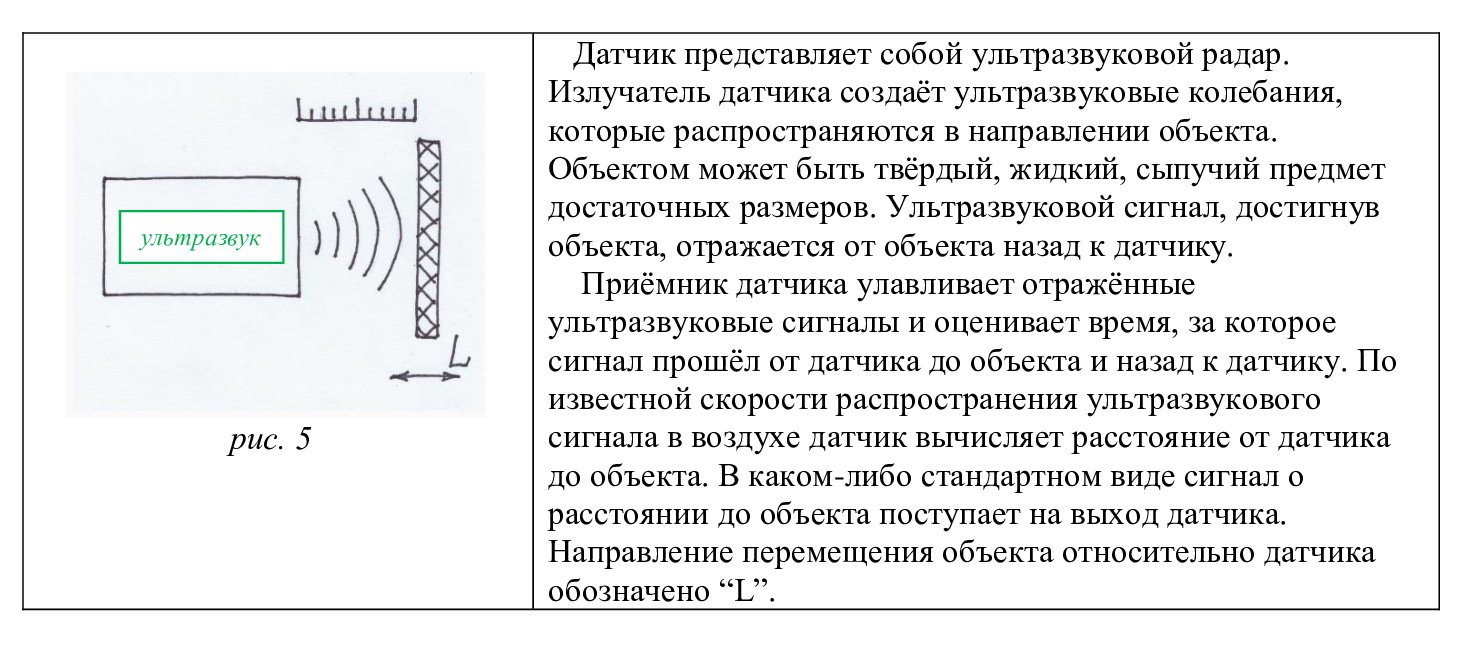
1).Ультразвуковые датчики.
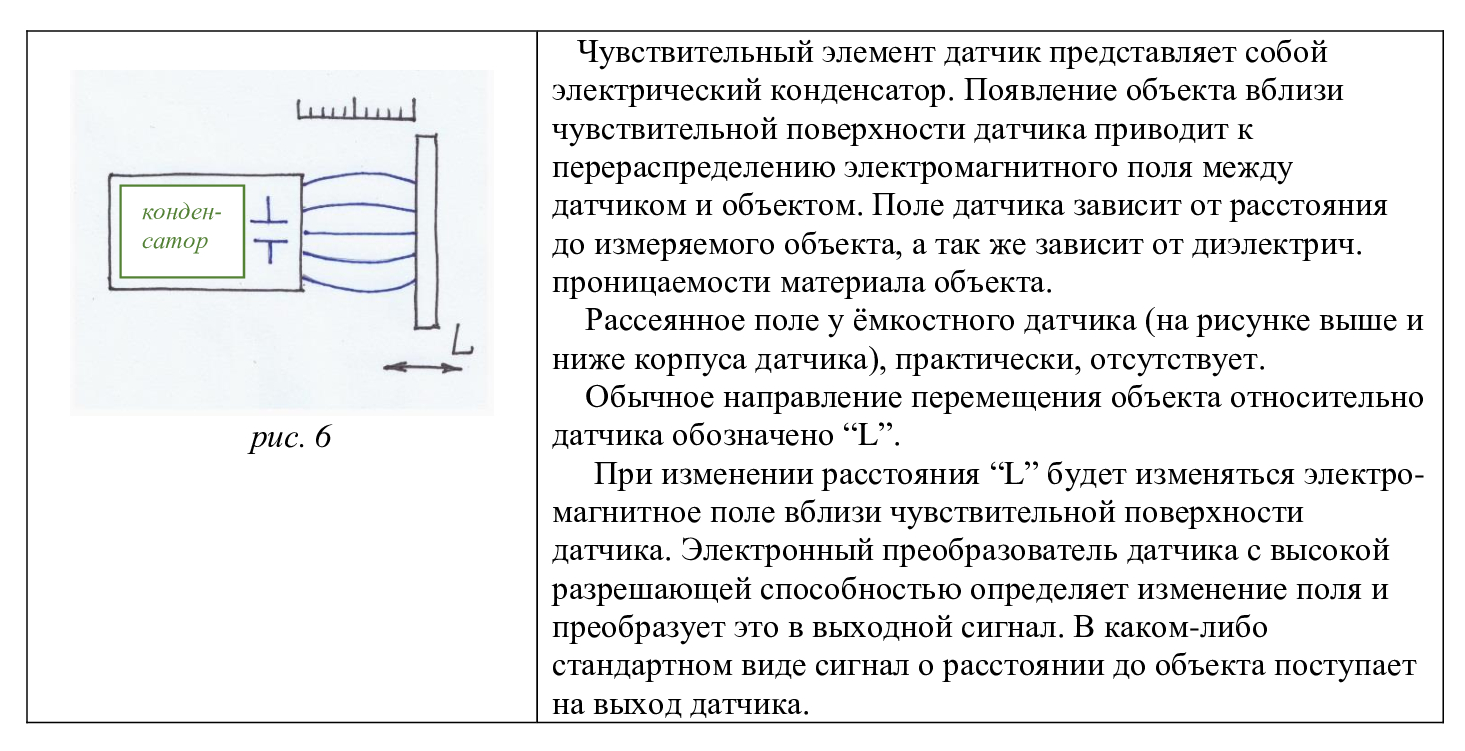
2).Ёмкостные датчики.
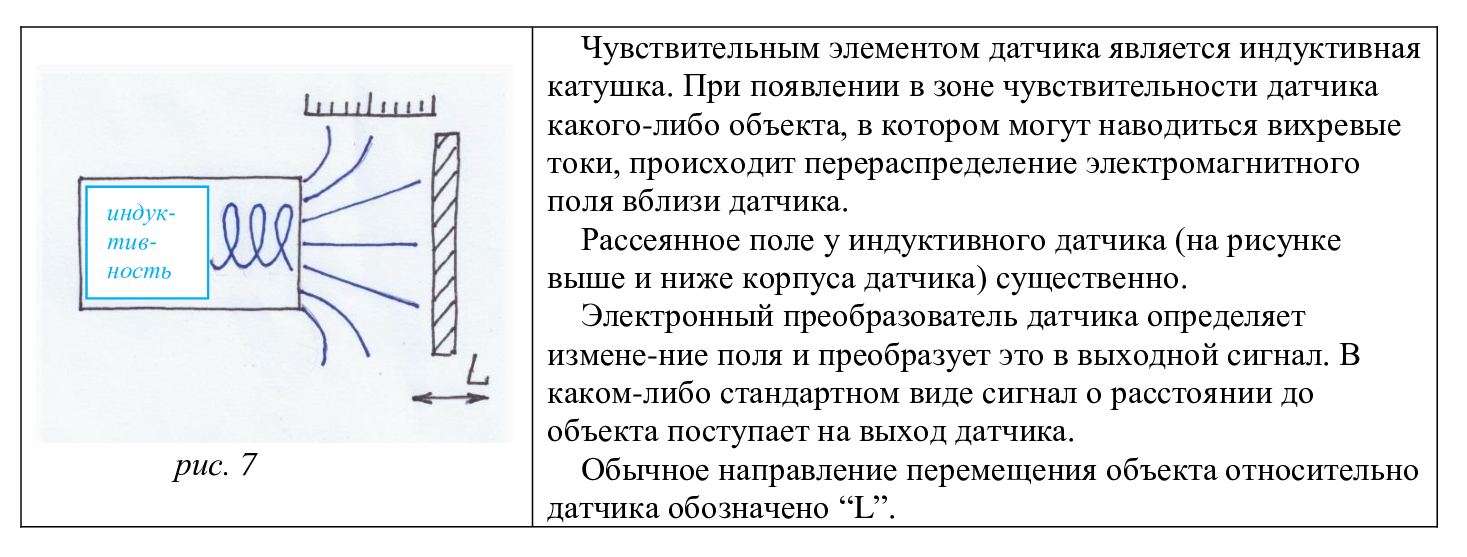
3).Индуктивные датчики.
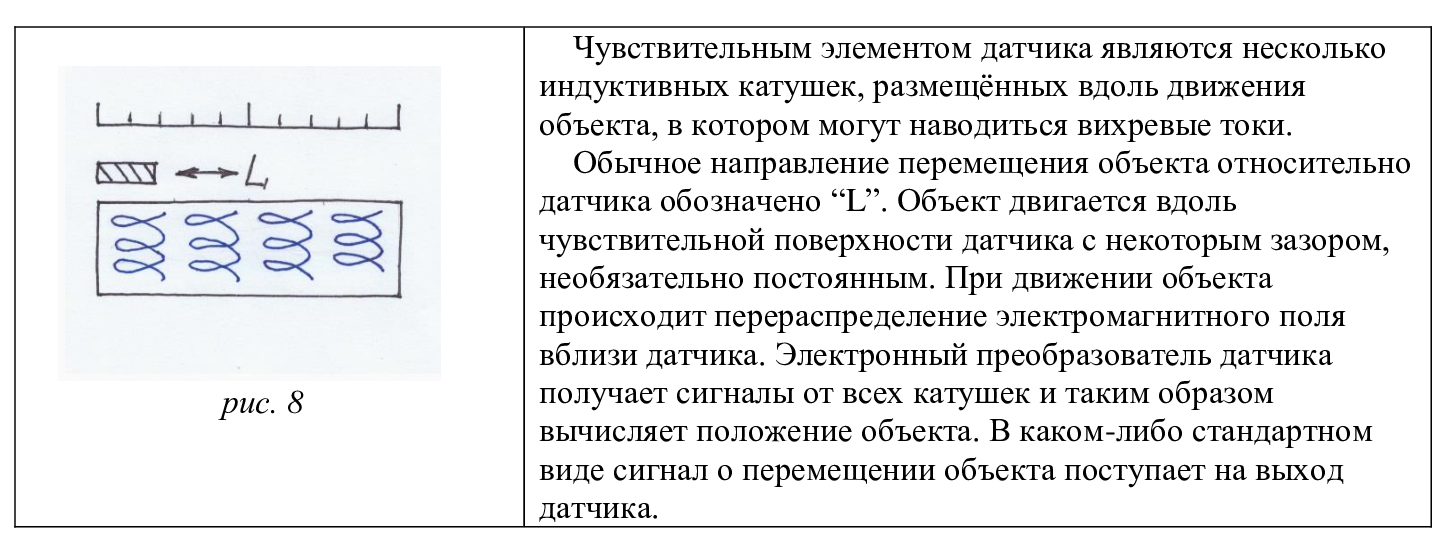
4).Индуктивные системы измерения движения.
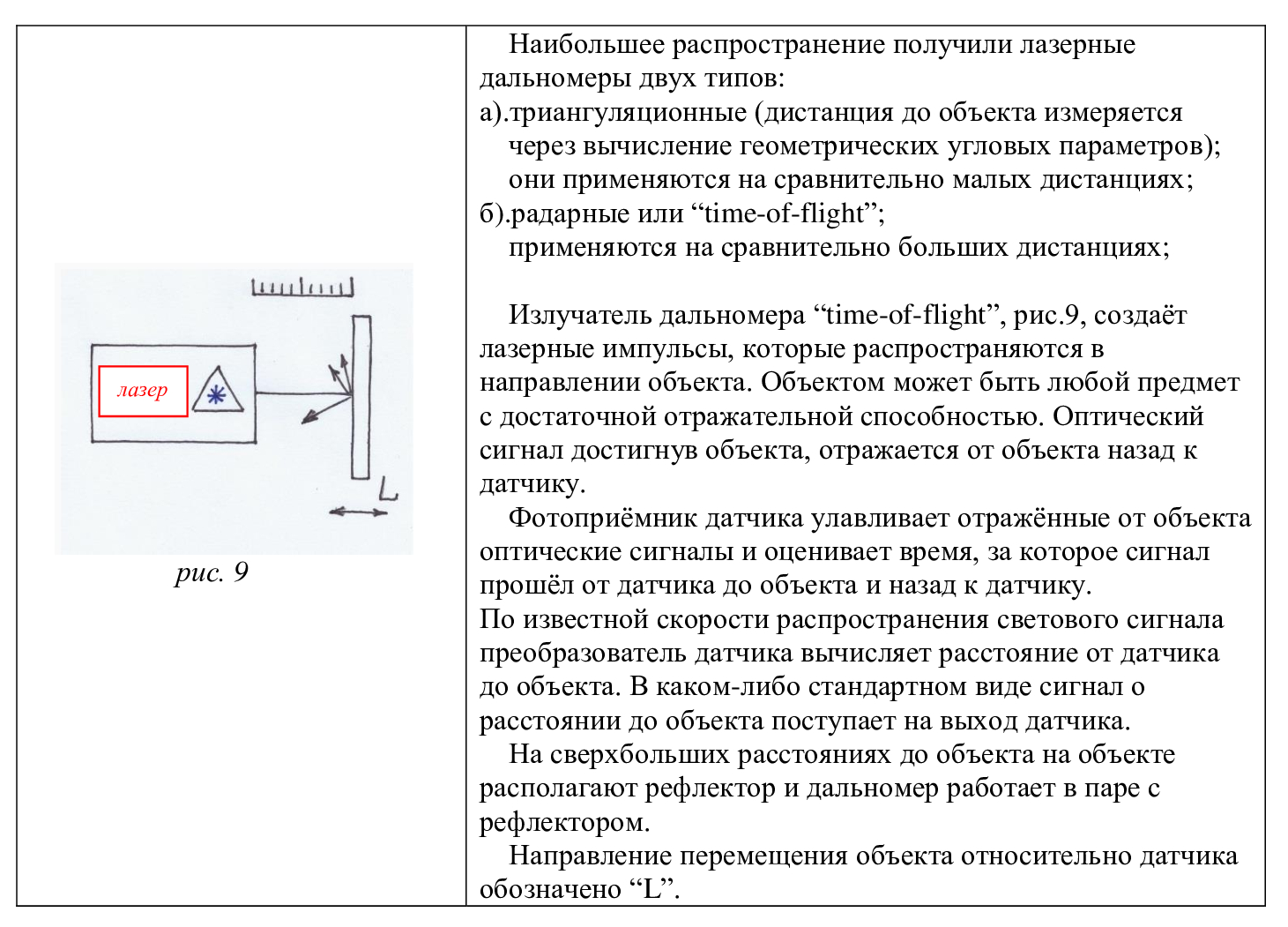
5).Оптические (лазерные) дальномеры.
6).Оптические системы измерения движения.
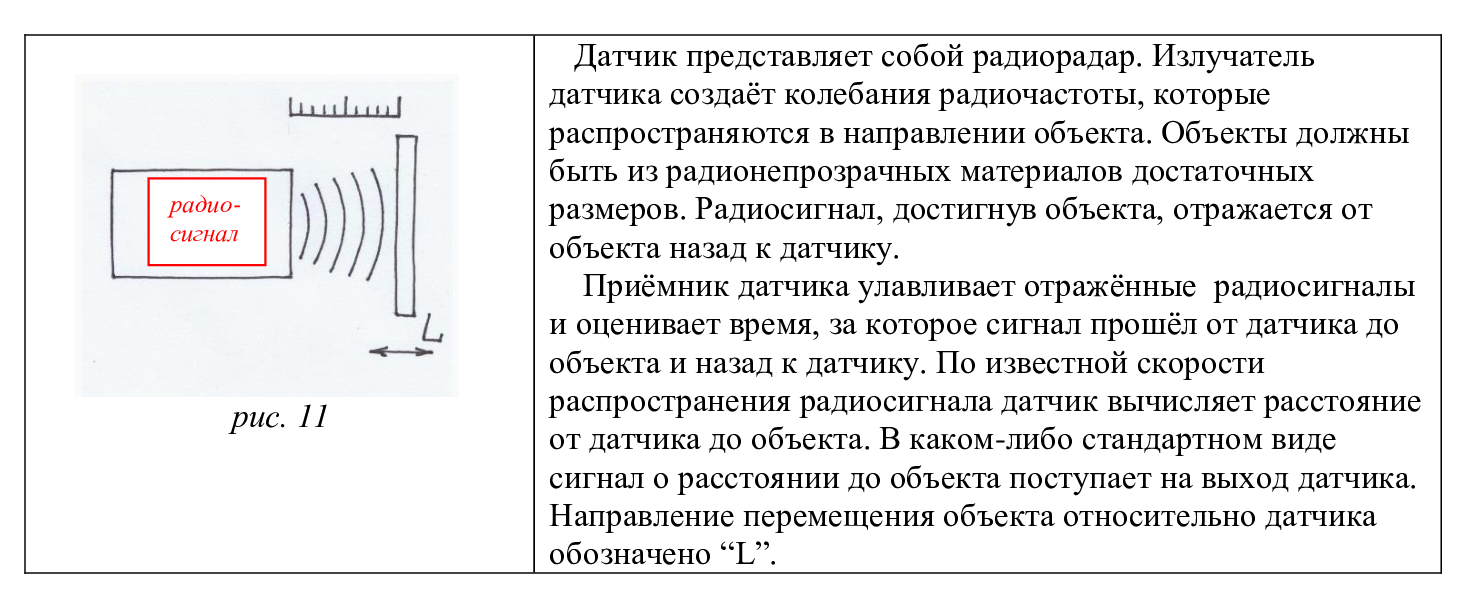
7).Радиоволновые датчики.
В каждом рассмотренном типе датчиков таблицы 9 показаны:
-максимальные расстояния,
-наилучшее разрешение
на фоне логарифмической шкалы расстояний.
Максимальное расстояние и наилучшее разрешение необязательно относятся к одному и тому же датчику. Однако, сопоставление эти двух параметров позволяет судить об измерительных возможностях датчиков рассмотренного принципа действия.
Подробно ознакомиться с конкретными изделиями можно по ссылкам, названным в квадратных скобках таблицы 9.
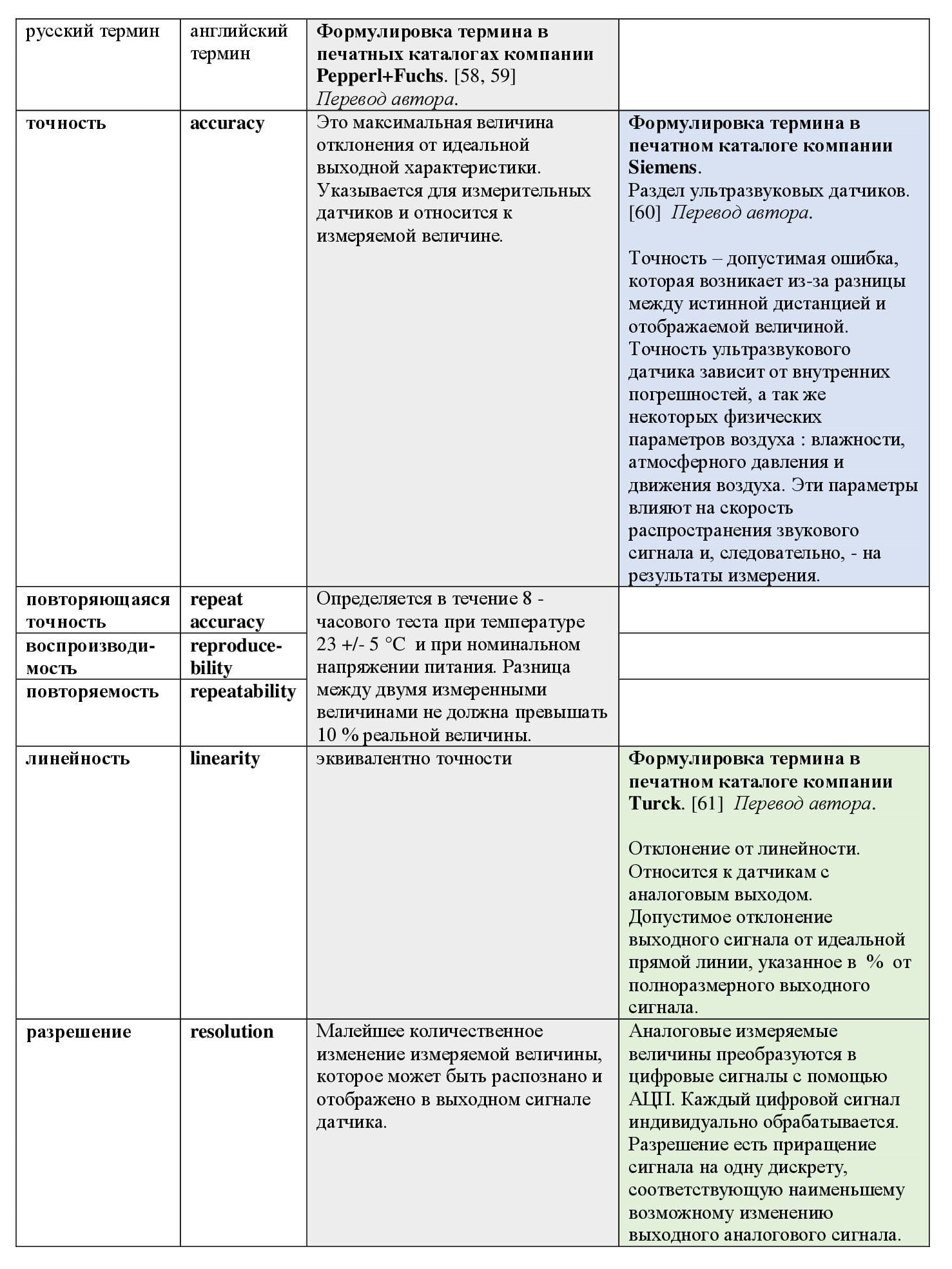
Производителями датчиков придумано и применяется довольно много параметров для точностных характеристик своих изделий :
-точность (accuracy),
-повторяющаяся точность (repeat accuracy),
-воспроизводимость (reproducibility),
-повторяемость (repeatability),
-линейность (linearity),
-разрешение (resolution)
-температурный дрейф (temperature drift)
и т.д.
Есть некоторая разница в формулировках этих параметров у разных производителей. Кроме того, производители иногда указывают конкретные внешние или технологические условия, при которых производитель гарантирует свой точностной параметр.
Смысл понятий точности у некоторых производителей.
Таблица 8.
Для сопоставления точностных возможностей датчиков в таблице 9 использован параметр наилучшее разрешение.
Почему ? Потому что именно этот численный параметр показывает технический предел теоретически возможной точности измерения дистанции. Этот технический предел определяется электрическими шумами, температурными дрейфами даже в узком диапазоне температур, нестабильностями окружающей среды (электромагнитные помехи и фон, окружающее освещение, движение окружающего воздуха – всё этот для датчиков разных принципов действия имеет значение по-разному).
Другими словами, наилучшее разрешение – это теоретически возможная точность измерения дистанции датчиком в условиях :
-абсолютно стабильной температуры,
-абсолютно стабильного электропитания,
-абсолютного отсутствия всех влияний внешней среды.
В таких идеальных условиях точность измерения будет определяться только внутренними шумами датчика. Минимально различимое изменение дистанции и есть наилучшее разрешение датчика. Однако, такие идеальные условия недостижимы на практике, особенно на производстве. Поэтому реальные точности измерения перемещений рассмотренными датчиками будут заметно хуже наилучшего разрешения. Например, из практики автора известно, что некоторые типы дальномеров “time-of-flight” при наилучшем разрешении 1 мм имеют реальную точность измерения 20 … 30 мм, то есть в 20 … 30 хуже, чем их наилучшее разрешение.
Тем не менее, нужна для сравнения, описания датчиков какая-то единая “база”, пусть идеальная. Этой единой базой и выбрано наилучшее разрешение.
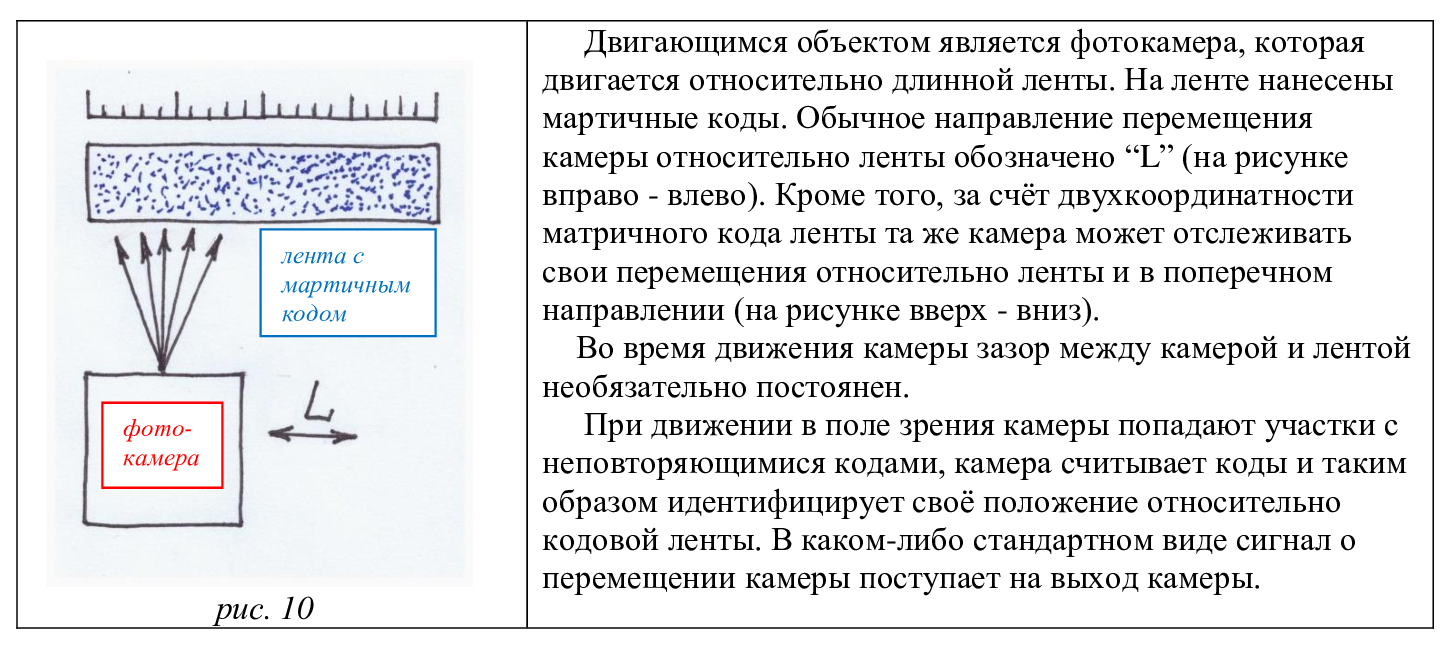
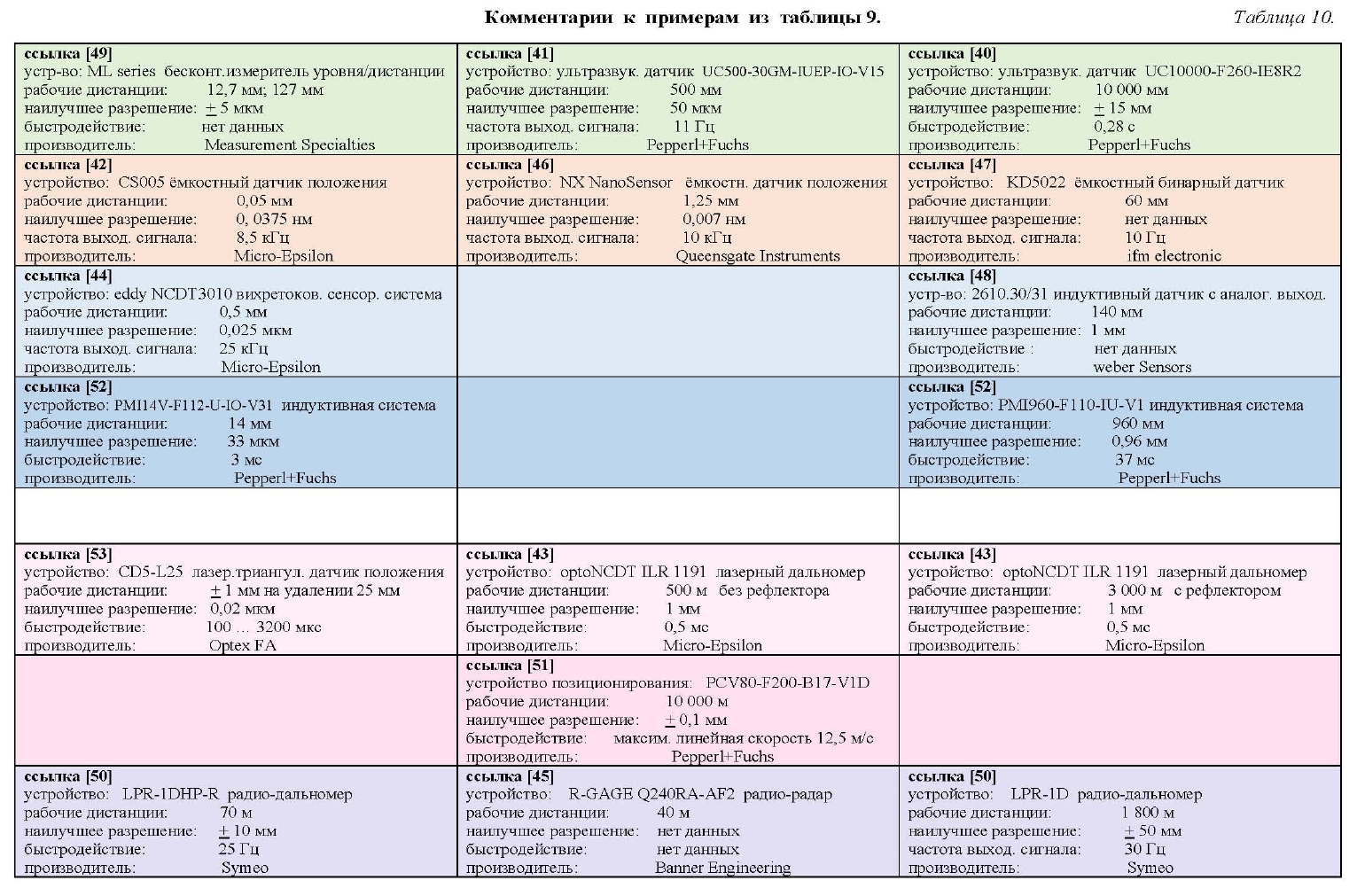
Таблицы 9 и 10 соответствуют друг другу. В них показаны одни и те же ссылки на одни и те же конкретные датчики для измерения дистанций. В таблице 10 для каждого датчика дан параметр, характеризующий быстродействие.
Выводы из анализа технических описаний датчиков, названных в таблицах 9 и 10.
1). Современные датчики и системы для автоматизации производств покрывают огромный диапазон дистанций и перемещений: от пикометров, измеряемых ёмкостными датчиками [46], до 10 километров, измеряемых системой из оптической камеры и матричной кодовой ленты [51]. Таким образом, освоенный диапазон перемещений составляет 1016 , т.е. 16-ть порядков !
2). Наибольший диапазон измерения имеют оптические датчики : от сотых долей микрона до километров, т.е. 11 порядков.
3). Наилучшие разрешения имеют датчики : ёмкостные, оптические, индуктивные, ультразвуковые.
4). Наибольшие дистанции обеспечивают датчики : оптические и радиоволновые.
5). Наибольшим быстродействием обладают датчики : оптические, индуктивные, ёмкостные.
6). Самые неприхотливые к пыльной/грязной окружающей среде датчики: индуктивные, ультразвуковые.
7). Очевидно, что современное машинное производство начала XXI века весьма требовательно к точностям.
Полезные ссылки:

Портал с разнообразной, интересной, систематизированной информацией о датчиках. Смежные знания.
Узнать больше